Le véhicule électrique à balancement
possède deux roues indépendantes parallèles : le basculement du guidon
vers l'avant permet de déclencher une phase d'accélération et vers
l'arrière, une phase de décélération. A l'arr^t, l'équilibre est obtenu
sans que l'utilisateur ne pose le pied à terre. L'énergie électrique
est fournie par deux batteries de 24 V associées en dérivation.
|
|
Capteur
d'inclinaison et mise en marche de la trotinette.
Le capteur d'inclinaison délivre une tension continue v,
proportionnelle à l'angle q
formé par l'axe vertical et le tube de maintien du guidon. On donne la
caractéristique du capteur.
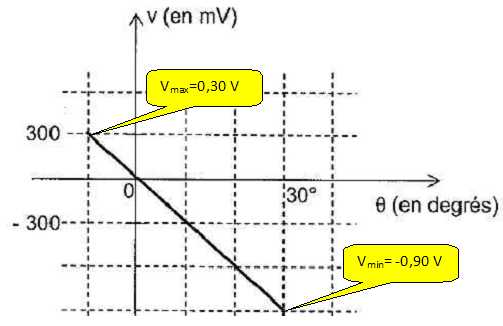
Des butées mécaniques limitent les variations de q entre -10° et
+30°.
Déterminer
la valeur maximale Vmax et la
valeur minimale Vmin de la
tension v.
Montrer
que la caractéristique du capteur peut s'écrire v = kq avec k = -0,03 V
/°, avec v en
volt et q
en degré.
La caractéristique est une droite passant par l'origine : la fonction
linéaire est de plus décroissante ;
la pente est égale à : k = -1,2 / 40 = -0,03 V / °.
La tension v est appliquée à l'ntrée du montage à amplificateurs
opérationnels suivant :
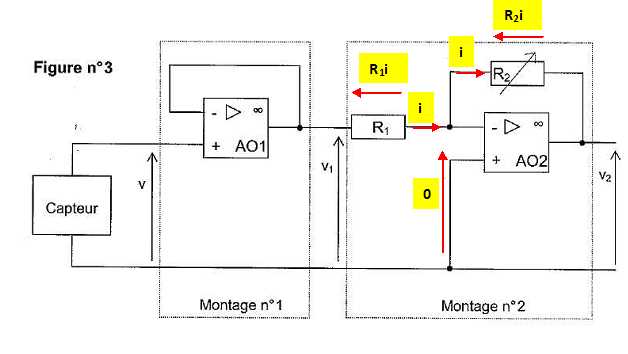
Exprimer v1 en
fonction de v. Quel est le nom et le rôle du montage 1 ?
v = v1 ; il s'agit d'un montage suiveur de
tension : v1 est constante quelle que soit la
charge.
Le
montage 2 fonctionne-t-il en régime linéaire ? Justifier.
L'existence d'une boucle entre l'entrée inverseuse et la sortie fait
que l'AO 2 fonctionne en régime linéaire.
Montrer
que v2 = -R2/R1
v1. Quelle est
la fonction réalisée ?
v1 = R1 i ; v2+R2
i=0 ; v2 = -R2/R1
v1.
La tension v2 est amplifiée et son signe change
( par rapport à v1).
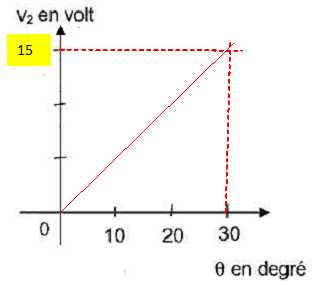
On souhaite obtenir une tension v2 = +1,0 V si q = 2°. R1
= 3,0 kW.
Calculer
R2.
v1 = -0,03*2 = -0,06 V ; R2
= -R1
v2 / v1 = 3,0*1,0 / 0,06
= 50 kW.
Tracer
v2 = f(q).
v2 = -R2/R1
v1 = -50 / 3 *(-0,03 q) = 0,5 q.
|
.
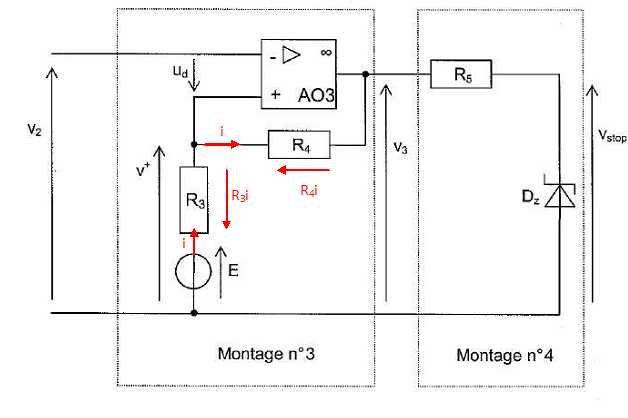
Gestion
de la fonction marche /arrêt.
Un montage comparateur est représenté ci-dessous :
L'AO
3 fonctionne-t-il en régimelinéaire ? Justifier Quelles sont les
valeurs possibles de la tension v3
?
Il n'y a pas de boucle entre l'entrée inverseuse et la sortie : l'AO
fonctionne en régime de saturation ; deux valeurs sont possibles pour
la tension v3 : +Vsat =
+15 V et -Vsat = -15 V.
Exprimer
v+ en
fonction de E, v3, R3 et R4.
v3 + R4 i = v+
; v+ = E-R3 i
soit i = (E-v+) / R3
; v+ = v3
+ R4 i = v3
+ R4
(E-v+) / R3 ;
v+(1+R4/
R3) = v3
+ R4/
R3 E.
v+
=( v3
+ R4/
R3 E.)/ (1+R4/
R3).
On
donne E = 2,25 V; R3 = 1 kW; R4
= 16 kW.
Calculer
les valeurs prises par v+ pour les
valeurs possibles de v3.
v3 = +15 V : v+ = (15
+16*2,25) / (1+16) = 3,0 V ; v3
= -15 V : v+ = (-15 +16*2,25) / (1+16) = 1,23
~1,2 V.
Quel
nom porte la tension ud ?
Exprimer ud en
fonction de v+ et v-
puis
en fonction de v2, E, v3, R3 et R4.
La tension différentielle s'exprime par : ud = v+
-v- = ( v3
+ R4/
R3 E.)/ (1+R4/
R3) -v2.
Pour
ud>0,
ecrire l'expression vérifiée par v2 et
montrer que le seuil de basculement V2h = 3 V.
0= ( v3
+ R4/
R3 E.)/ (1+R4/
R3) -V2h ; v3
= +15 V ; V2h = ( v3
+ R4/
R3 E.)/ (1+R4/
R3) = 3,0 V.
Pour ud<0,
ecrire l'expression vérifiée par v2 et
montrer que le seuil de basculement V2b = 3 V.
0= ( v3
+ R4/
R3 E.)/ (1+R4/
R3) -V2b ; v3
= -15 V ; V2h = ( v3
+ R4/
R3 E.)/ (1+R4/
R3) = 1,2 V.
Tracer
v3 = f(v2).
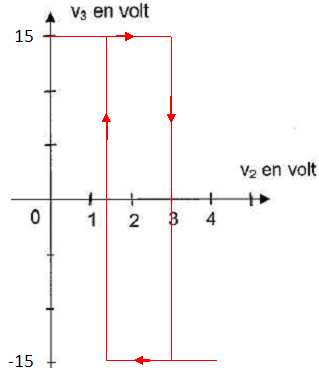
v2
varie de 1,2 à 3 V ; montage comparateur à hystérésis.
Les comparateurs à deux seuils ne sont pas sensibles au bruit.
Adaptation en tension
( diode Zener Dz et résistance R5
).
Dz est une diode Zener Uz=
5 V supposée idéale.
Donner
la valeur de Vstop pour v3 = 15 V et
v3 = -15 V.
Si v3 = + 15 V,la diode Zener est
passante en inverse : Vstop = Uz
= 5 V.
Si v3 = - 15 V,la diode Zener est
passante en direct : Vstop = 0
V.
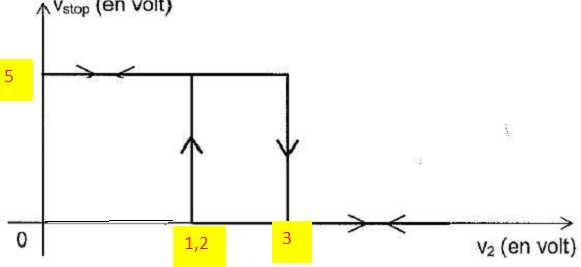
Si Vstop = +5 V, arrêt du véhicule ; si Vstop
= 0 V, mise en marche du véhicule.
|
angle |
v(V) |
v2(V) |
v3(V) |
Vstop(V) |
mise en
mouvement ( oui / non ) |
| Guidon
poussé en avant |
+10° |
-0,03*10
= -0,3 |
0,5*10 =
5 |
-15 |
0 |
oui |
| Guidon
poussé en avant |
+2° |
-0,03*2
= -0,06 |
0,5*2 = 1 |
+15 |
5 |
non |
| Guidon
relâché |
0° |
0 |
0 |
+15 |
5 |
non |
.
|
-
|
|