Les drones grand
public. Bac S
Inde 2016.
En poursuivant votre navigation sur ce site, vous acceptez l’utilisation de Cookies vous proposant des publicités adaptées à vos centres d’intérêts.
|
|
|
|
|
|
|
|
Les
drones de loisirs à quatre hélices sont des véhicules aériens de faible
dimension. Ils sont vendus au grand public comme un jeu pour
l’intérieur ou l’extérieur.
Partie1 : connexion Wifi.
De nombreux drones sont pilotés depuis un téléphone portable à l’aide d’une connexion WiFi.
Un réseau WiFi permet une communication par ondes électromagnétiques entre différents
appareils. Les connexions WiFi peuvent se faire suivant plusieurs protocoles de communication
dont le protocole standard IEEE 802.11g.
Effet Doppler.
Lorsque l’émetteur d’une onde se déplace par rapport au récepteur, le décalage Doppler est donné
par la relation fR -fE = ±v / c fE.
dans le cas où la vitesse de déplacement est faible par rapport à la
vitesse de propagation des ondes. Le signe est fonction du sens de
déplacement de l’émetteur par rapport au récepteur.
fR est la fréquence reçue par le récepteur
fE est la fréquence émise par l’émetteur
c est la vitesse de propagation des ondes
v est la vitesse de déplacement de l’émetteur
Les chemins multiples
« Les phénomènes de réflexion et de diffraction sont utiles pour capter
le signal à un endroit où l’émetteur n’est pas visible : on dit qu’on
est en condition dhttp://www.chimix.com/an16/kine16/ad1.htmle Non Line Of Sight (NLOS), c’est-à-dire que l’on n’a
pas une ligne de vision directe. Mais les réflexions et diffractions
peuvent également être nuisibles lorsqu’elles font apparaître de
multiples chemins possibles entre l’émetteur et le récepteur. »
D'après WiFi professionnel : La norme 802.11, le déploiement, la sécurité Aurélien Géron.
Les
signaux transmis en WiFi se dégradent avec la distance et avec les
obstacles, ce qui limite la portée et le débit de la liaison.
L’objectif de cette partie est de mettre en évidence quelques
phénomènes physiques qui influencent la qualité de la transmission des
informations en WiFi.
1.1. Transmission d’informations avec le protocole standard IEEE 802.11g.
Un drone est piloté à l’aide d’un téléphone portable. Il est équipé
d’une webcam de résolution 1280 x 720 pixels filmant à 30 images par
seconde. Le codage de chaque image est de 24 bits par pixel. Il envoie
ses informations au téléphone portable via le réseau WiFi.
1.1.a. Identifier les éléments de la chaîne de transmission des images.
webcam du drone ; transducteur émission : codage des images
; émetteur ; canal de transmission : l'air ; récepteur :
téléphone portable ; transducteur réception.
Lorsque le drone s’éloigne du téléphone, le signal électromagnétique reçu par celui-ci s’affaiblit.
1.1.b. Calculer l’atténuation du signal lorsque le drone se situe à 10 m du téléphone portable.
A = 40 + 20 log d avec d = 10 m ;
A = 40 + 20 log 10 = 60 dB.
1.1.c. En déduire
la puissance maximale que peut recevoir le téléphone lorsqu’il est
situé à 10 m du drone. Puissance d'émission maximale PE = 100 mW.
A = 10 log ( PE / PR) ; PE / PR = 100,1A ; PR = PE 10-0,1A = 100 *10-6 =1,00 10-4 mW.
1.1.d.
Le débit théorique maximal de la connexion WiFi permet-il de visualiser
la vidéo en direct sur le téléphone portable ? Débit théorique maximal
= 54 Mbits /s.
1280 x 720 pixels filmant à 30 images par seconde :
1280*720*30=2,76 107 pixels / s.
Le codage de chaque image est de 24 bits par pixel :
2,76 107 *24 = 6,64 108 bits / s ou 664 Mbits / s.
Le débit maximal de la connexion Wifi est insuffisant.
|
|
|
1.2. Les problèmes de transmission en WiFi.
On aborde les problèmes de transmission entre le drone et le téléphone
portable lorsque le drone se déplace à une vitesse de croisière de
l’ordre de 3 m.s-1.
1.2.a. Comparer la
fréquence de l’onde radio émise par le drone à la fréquence de l’onde
reçue par le téléphone portable lorsque le drone s’éloigne. Estimer la
variation relative de la fréquence.
fE = 2,4 GHz ; c = 3,0 108 m/s.
Lorsque le drone s'éloigne du récepteur, la fréquence reçue est inférieure à la fréquence émise.
fR -fE = -v / c fE =3 / (3,0 108) *2,4 109 = -24~ -2 101 Hz.
| fR -fE | / fE = 24 / (2,4 109)*100 ~ 1 10-6 %.
1.2.b. Calculer la longueur d’onde des signaux émis en WiFi.
l = c / f = 3,0 108 / (2,4 109) = 0,125 m ~0,13 m.
1.2.c. Un tronc d’arbre placé sur le trajet des ondes WiFi est-il susceptible de diffracter ces ondes ? Justifier.
Le diamètre du tronc est de quelques dizaines de cm, c'est à dire du
même ordre de grandeur que la longueur d'onde. La diffraction des ondes
par cet obstacle sera donc importante.
1.2.d. La
superposition d’ondes ayant parcouru des chemins différents peut
provoquer des interférences. À quelle condition obtient-on des
interférences destructives ? Dans ce cas, quelle sera la conséquence
sur la valeur de la puissance reçue ?
Si la différence de marche entre les ondes qui interfèrent est un
multiple de la demi-longueur d'onde, les interférences sont
destructives et la puissance reçue sera pratiquement nulle.
1.2.e. t1 et t2 représentent respectivement les durées du trajet de l’onde A-C-B et A-B entre le drone et le téléphone.
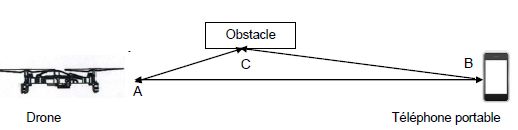
On définit la durée Dt = t1-t2. Parmi les 4 valeurs de Dt suivantes, indiquer celle(s) qui conduit (conduisent) à des interférences destructives. Justifier votre réponse.
T/2, T, k.T, k.T+T/2, k.T/2 k est un entier.
d = (2k+1)l / 2 ; l = cT avec c = 3,0 108 m/s.
AB = c t2 ; AC +CB = c t1 ; d =cDt.
Dt= (2k+1)T / 2 soit T/2 ; kT +T/2.
|
|
|
|
Partie 2 : Étude dynamique du vol d’un drone.
Dans cette partie, on étudie le mouvement du drone dépourvu de webcam
dans le référentiel terrestre supposé galiléen. Le drone étudié, de
masse 110 g, est assimilé à un point matériel noté G.
Le champ de pesanteur terrestre est considéré uniforme ; la valeur de son intensité g vaut 9,8 N.kg-1.
2.1. Estimation de la valeur de la force de poussée.
Un film du décollage vertical a été réalisé afin de déterminer la force de poussée exercée sur le drone.
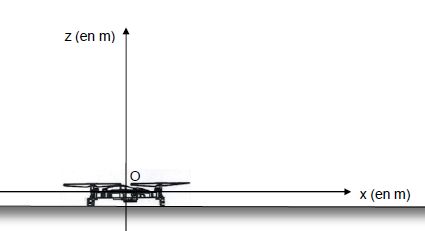
Le schéma ci-dessous représente la position du drone à l’instant
initial. Le point O est l’origine du repère. Le schéma ci-dessous est
tracé sans souci d’échelle.
L’exploitation du film a permis d’obtenir l’évolution dans le temps des grandeurs z(t) et az(t),
respectivement coordonnées suivant l’axe vertical du vecteur position
et du vecteur accélération du drone, et les deux courbes ci-dessous
modélisant l’évolution de ces grandeurs.
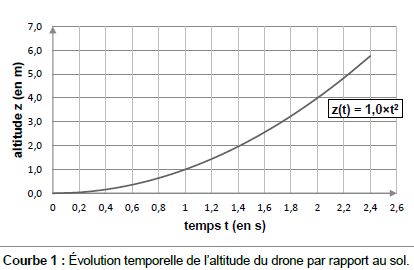
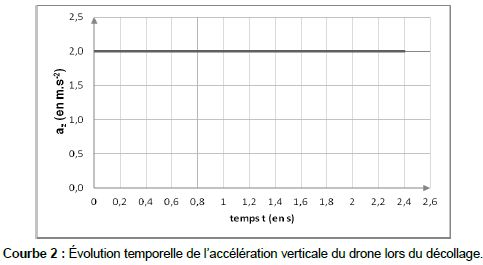
2.1.a. À partir de ces courbes, établir l’expression vZ(t) de la coordonnée suivant l’axe vertical (Oz) du vecteur vitesse du drone.
az = 2,0 ms-2 ; la vitesse initiale est nulle.
La vitesse est une primitive de l'accélération : vz(t) = 2,0 t.
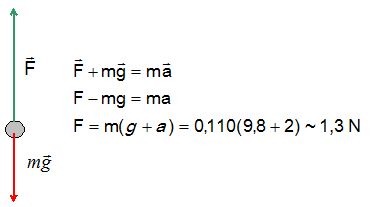
On suppose que seuls le poids P et la force de poussée F agissent sur le drone lors de la phasede décollage vertical.
2.1.b. Comparer qualitativement les valeurs des forces P et F lors du décollage. Justifier votre réponse.
2.1.c. Calculer la valeur de la force de poussée lors du décollage.
Le drone décolle si la poussée est supérieure à son poids.
2.1.d. On souhaite fixer une webcam de masse mw
sur ce drone. Quelle serait, en théorie, la masse maximale de cette
webcam au-delà de laquelle le décollage ne serait plus possible ?
A la limite : (m +mw) g = F ; mw = F / g -m = 1,298 / 9,8 -0,110 ~0,022 kg soit 22 g.
|
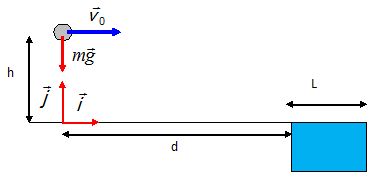
2.2. Conséquence d’une perte de communication sur le vol du drone.
Le drone, dépourvu de webcam, est à présent animé d’un mouvement
rectiligne uniforme à l’altitude constante h = 7,0 m et à la vitesse v0 = 4,0 m.s-1.
On choisit dans cette partie une nouvelle origine des temps.
À l’instant t = 0 s, la communication entre le drone et le téléphone
portable est rompue, alors que le drone vole en direction d’une
piscine. Les moteurs s’arrêtent. La valeur de la force de poussée
devient nulle. On considère que le drone est en chute libre alors qu’il
est à la verticale d’un point situé à une distance d = 20 m de la
piscine de largeur L = 5 m.
2.2.a. Proposer une schématisation légendée de la situation.
2.2 b.En détaillant la démarche, établir les équations horaires du mouvement du drone.
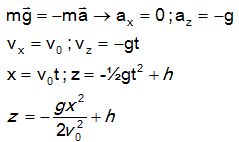
2.2.c. Déterminer le temps dont dispose l’opérateur pour rétablir la communication avant que le drone ne touche le sol.
Au sol z = 0 soit t =(2h / g )½ = (14 / 9,8)½~1,2 s.
2.2.d. Le drone tombe-t-il dans la piscine si la communication n’est pas rétablie ?
A t = 1,2 s, x = 4,0 *1,2 = 4,8 m. Le drone ne chute pas dans la piscine.
|
|