Allumage automatique des phares.
Le système d'allumage automatique des phares doit mesurer la valeur de
l’éclairement pour
déclencher l'allumage ou l’extinction des phares à la place du
conducteur. Cette mesure
s'effectue par un capteur de luminosité placé sur le pare-brise
(généralement derrière le
rétroviseur central).
Dans cette partie, on se propose d’étudier le fonctionnement d’un
dispositif
d’allumage automatique des phares d’un véhicule en utilisant le
matériel disponible
au laboratoire de physique d’un lycée.
On étudie tout d’abord un capteur de luminosité.
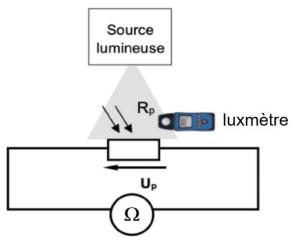
Afin de déterminer les caractéristiques du
capteur de luminosité choisi, le montage suivante est réalisé.
On mesure simultanément la valeur de la
résistance Rp entre les bornes de la
photorésistance à l’aide d’un ohmmètre et
l’éclairement E que la photorésistance reçoit
à l’aide d’un luxmètre.
 Q27
Q27 - Proposer une
méthode permettant de faire varier l’éclairement reçu par la
photorésistance pendant l’expérience.
Faire varier la tension d'alimentation de la source lumineuse.
Q28 - À
partir des valeurs expérimentales fournies, tracer la courbe Rp = f(E).
 Q29
Q29 - Décrire
l’évolution de la valeur de la résistance en fonction de l’éclairement.
La résistance Rp diminue lorsque l'éclairement augmente.
Q30 - Indiquer
qualitativement pourquoi la photorésistance peut être utilisée comme
capteur de luminosité pour le dispositif d’allumage automatique des
phares.
La photorésistance convertit la grandeur physique à mesurer(
l'éclairement) en une grandeur électrique ( la résistance).
C'est un capteur de luminosité.
Les spécifications techniques du système d’allumage automatique
étudié sont données ci-après.
Niveau d'allumage des phares : 1000 lux (± 25%)
Niveau d'extinction des phares : 3000 lux (±25 %).
temporisation < 20 s.
Q31 - À l’aide du graphique tracé
précédemment et des spécifications techniques ci-dessus,
déterminer la valeur de résistance Rp(allumage) associée à l’allumage
des phares et la
valeur de résistance Rp(extinction) associée à leur extinction.
Rp(allumage) =
1,2 kW ; Rp(extinction) =0,7 kW.
On souhaite réaliser une simulation de la commande de l’allumage
et de l’extinction des
phares à l’aide d’un montage intégrant un microcontrôleur.
On réalise d’abord un conditionneur selon le montage ci-dessous.
le générateur correspond au
microcontrôleur qui délivre une
tension U
G = 5,0 V ;
la photorésistance a pour valeur R
p ;
un conducteur ohmique de
résistance R = 10 k
W
est placé en
série avec la photorésistance.
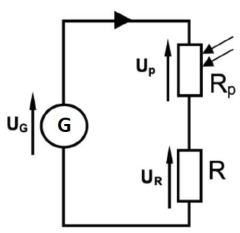
L’allumage des phares est commandé par la valeur de la tension U
R
aux bornes du
conducteur ohmique, donnée par la relation suivante :
U
R = U
G ×
R / (
R+ R
P).
Q32 - En utilisant
les résultats de la question précédente, calculer la valeur de U
R
(allumage)
au moment de l’allumage des phares et celle de U
R
(extinction) au moment de l’extinction
des phares.
U
R (allumage) =5,0 x 10 /(10+1,2) =4,46 ~4,5 V.
UR
(extinction) =5,0 x 10 /(10+0,2) =4,9 V.
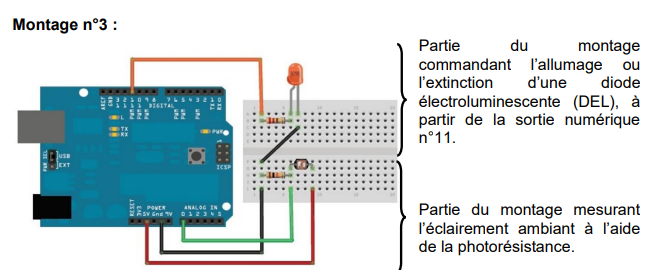
Dans la partie du montage mesurant l’éclairement ambiant à l’aide de la
photorésistance, le
microcontrôleur lit la tension U
R sur l’entrée analogique A
0
et la convertit en un nombre entier
N compris entre 0 et 1023.
La valeur de la tension U
R aux bornes de la résistance R et
le nombre N sont proportionnels.
Lorsque la tension lue est maximale (5,0 V) le nombre vaut N = 1023.
Q33 - En déduire
les nombres retournés par le microcontrôleur pour l’allumage et
l’extinction des phares, notés respectivement Nallumage et Nextinction.
Coefficient
de proportionnalité : 1023 / 5 =204,6.
N = 204,6 UR.
Nallumage=204,6 x4,5~921.
Nextinction.
=204,6 x4,9 ~1003.
Q34 - Pour faire le bilan
des résultats obtenus, recopier et compléter le tableau suivant.
|
E(lx)
|
Rp(kW)
|
UR
(V)
|
N
|
Allumage
|
1000
|
1,2
|
4,5
|
921
|
Extinction
|
3000
|
0,7
|
4,9
|
1003
|
Dans la partie du montage commandant l’allumage ou l’extinction d’une
diode
électroluminescente (DEL), qui est reliée à la sortie numérique n°11,
le microcontrôleur
délivre une tension qui peut prendre deux valeurs : 5 V (état « haut »
ou « high ») ou 0 V
(état « bas ou « low »).
Q35 - Recopier
l’extrait de l’algorithme ci-dessous et le compléter pour que le
microcontrôleur puisse commander l’allumage ou l’extinction de la diode
électroluminescente (DEL) en fonction de la luminosité ambiante.
On exécute une boucle.
Si la valeur de N est inférieure à
921.
alors placer la sortie n°11 dans l’état
haut
Si la valeur de N est supérieure à
1003.
alors placer la sortie n°11 dans l’état
bas
On laisse un délai de 250 ms et on relance la boucle.